Flapping foils for animal locomotions
The sweep back angle in animal propulsion surfaces such as fishtails, mammal flukes, and aquatic flippers is shown to have a negligible influence on fluid dynamic force and power. As such, animal fins and flukes can occur over a wide range of sweep angles without a propulsion penalty, explaining the observed variation in nature.
Presentation about this work will be made available after the last day of virtual conference of the American Physical Society Division of Fluid Dynamics APS-DFD on Nov 26th 2020.
The following link provide an interactive parallel-axis plot for the study results we did on the sweep angle & aspect ratio variations: Interactive Parallel-coordinate graph. You can play with the interactive graph by turning on and off some parameters and values on the axis for better isolating linked inputs & outputs. Unfortunately, the interactive graph is very heavy to be embeded in this page, so the graph will open a new page on your screen.
The static graph is also provided in github link along with the data in csv filetype. The static graph looks like this :
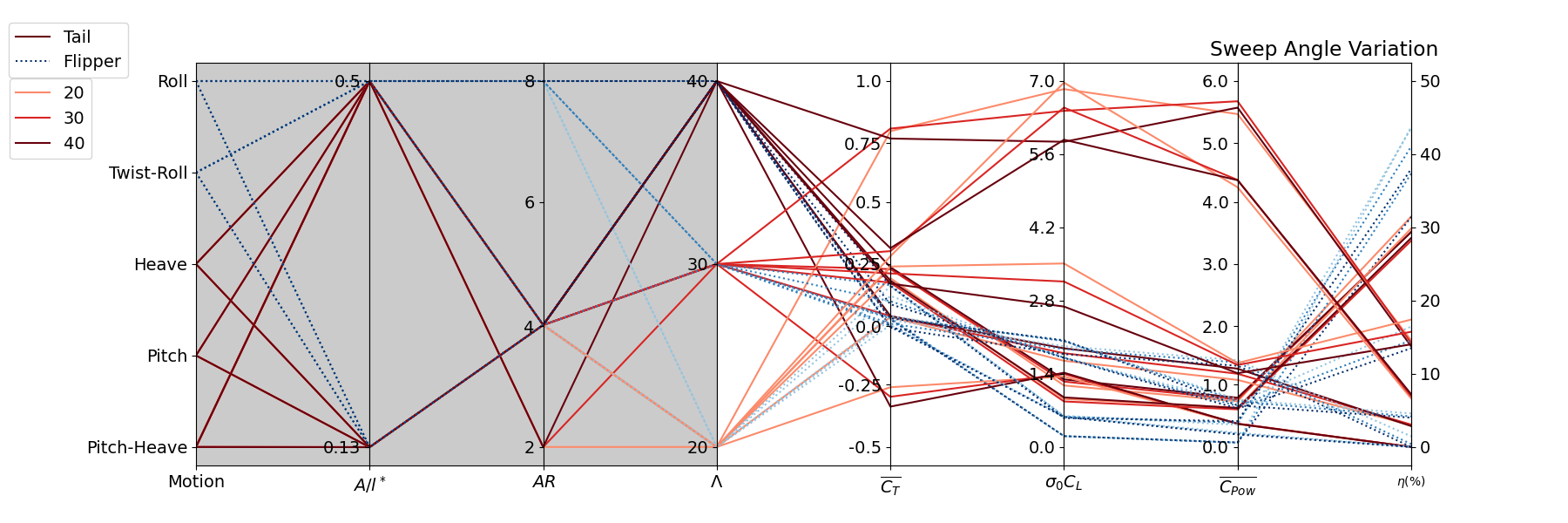
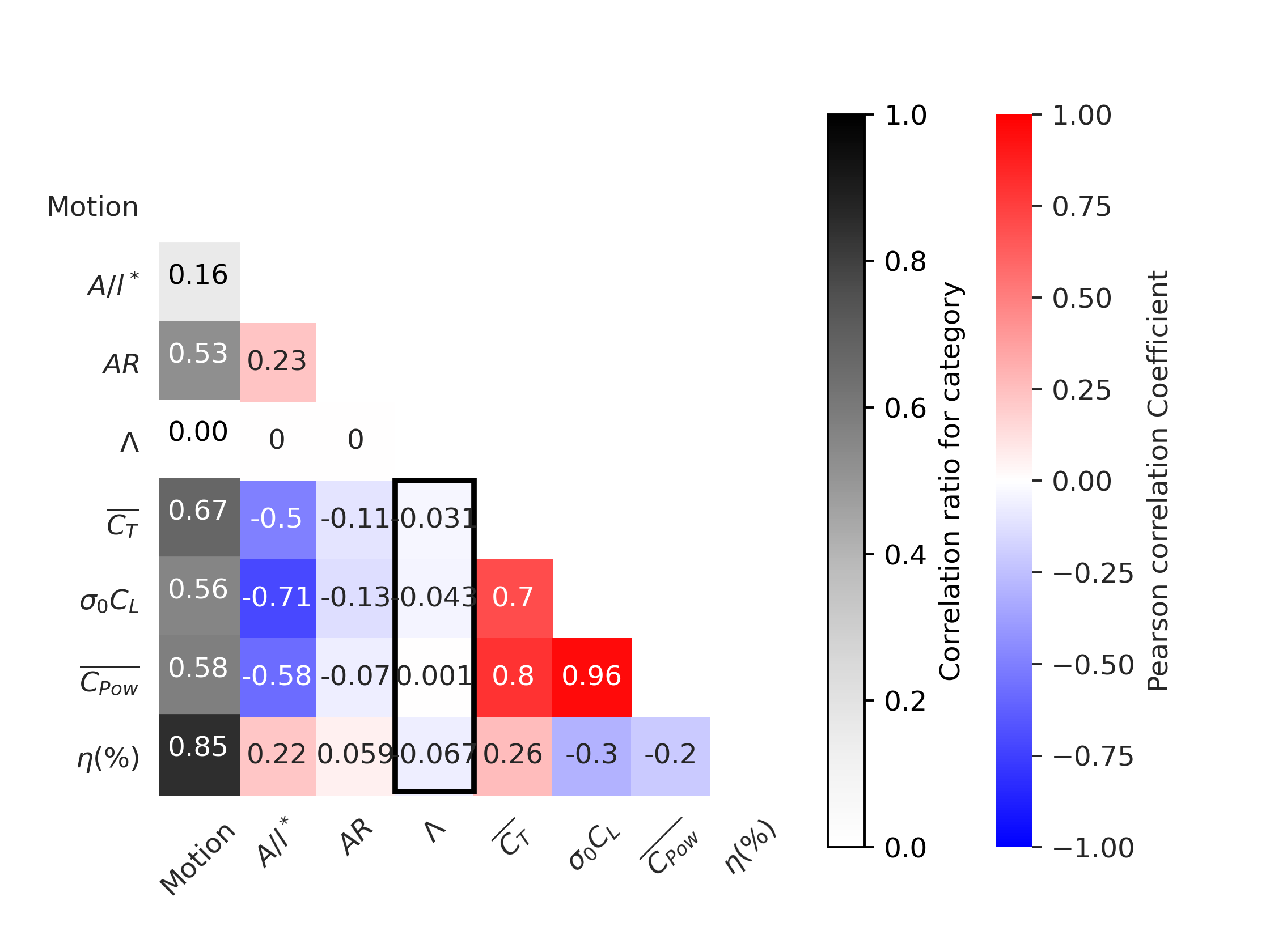
The full python scripts are provided for both static and interactive ones in my github along with the correlation coefficients heatmap graph.
Heatmap of Pearson correlation and the correlation ratio script provide easy explanation of correlation between inputs (motion, aspect ratio and sweep angle) and outputs (The coefficients of lift CL, thrust CT, power and efficiency). The following graph can be accesed through this link.
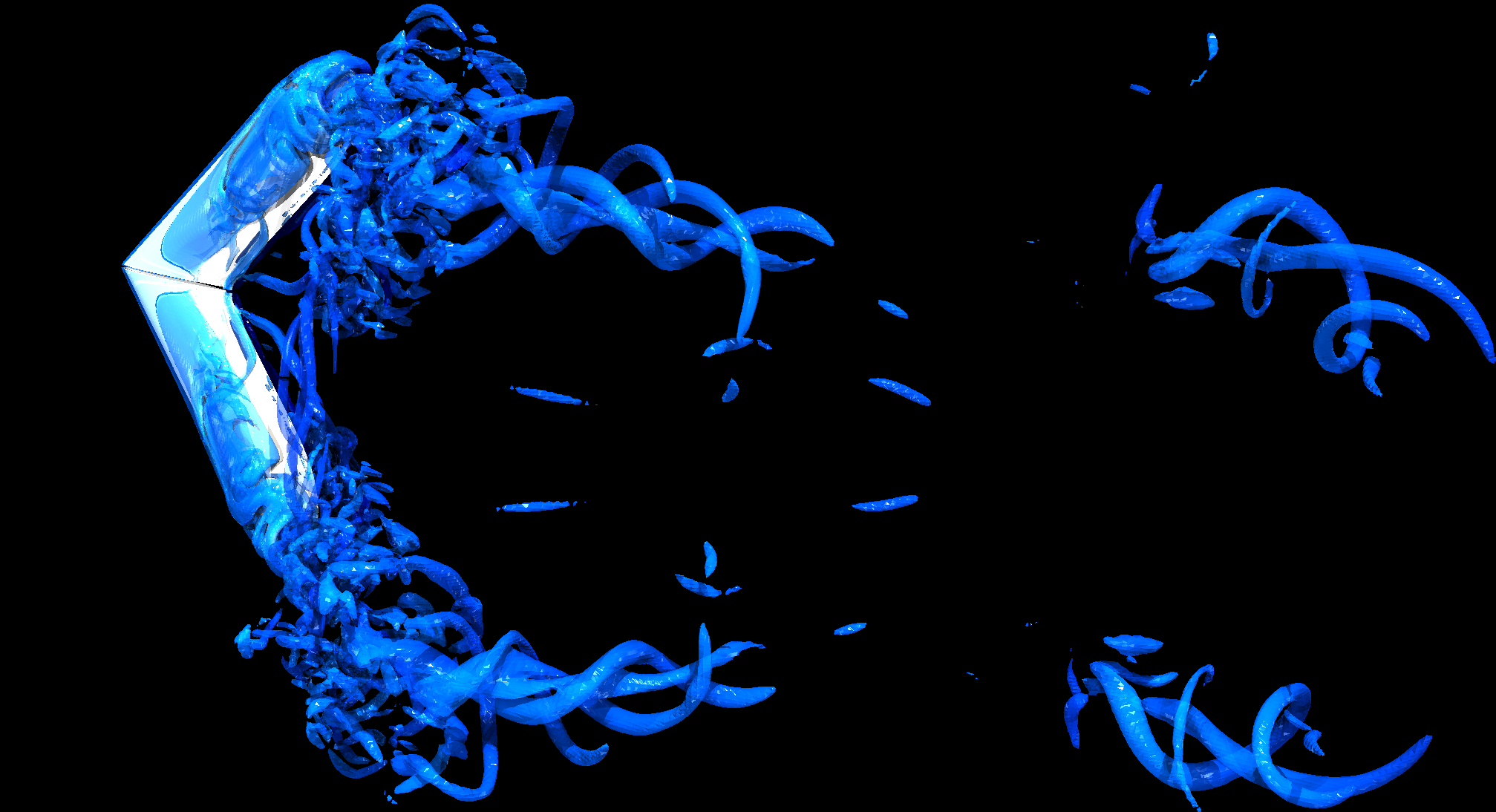
The following youtube videos are the supplementary electronic data for our journal manuscript figure 3. The manuscript status/link will be updated as soon as it is accepted.
- Tail-like motion, sweep angle 20, AR=4 (Figure 3a)
- Tail-like motion, sweep angle 40, AR=4 (Figure 3c)
- Flipper-like motion, sweep angle 20, AR=8 (Figure 3b)
- Flipper-like motion, sweep angle 40, AR=8 (Figure 3d)